
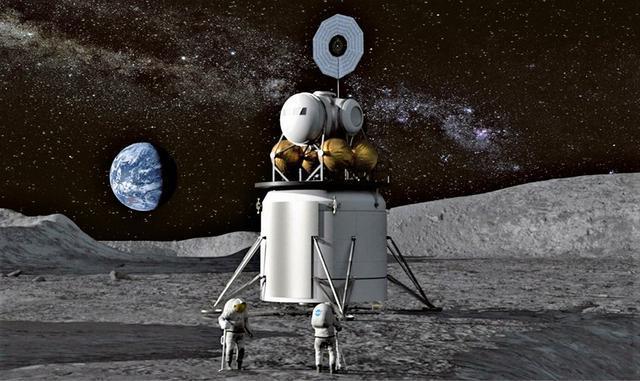
随着科技的飞速发展,人类对太空的探索愈发深入,登月机器人作为太空探索的重要工具,其研发进展一直备受关注,我国正致力于研发一款六足登月机器人,这一创新技术将为我们打开全新的太空探索时代,本文将详细介绍这款六足登月机器人的研发背景、技术特点、功能及应用,以及技术难点与解决方案,并探讨其发展前景和对未来的影响。
研发背景
随着国家科技实力的不断增强,我国在航天领域的投入也在逐步加大,登月机器人作为实现月球探测和科研任务的重要工具,其研发具有重要意义,六足登月机器人的研发,旨在满足复杂月球环境下的移动、探测和科研需求,为我国的月球探索事业提供有力支持。
技术特点
1、六足设计:六足设计使得机器人在复杂地形中的移动能力更强,能够适应月球表面的不平整环境。
2、智能化控制:采用先进的算法和控制系统,实现机器人的自主导航、智能避障和自主决策。
3、高负载能力:机器人具备较强的负载能力,可携带多种科研设备,进行多样化的科研任务。
4、远程操控:具备可靠的远程操控系统,方便地面操作人员对机器人进行实时监控和操控。
5、耐用性高:采用特殊的材料和工艺,确保机器人在极端环境下的稳定性和耐用性。
功能及应用
1、月球表面巡视:六足登月机器人将在月球表面进行巡视,搜集地质、地貌、环境等信息。
2、科研样本采集:机器人将携带采样器,采集月球表面的土壤、岩石等样本,为科研提供宝贵数据。
3、探测月球资源:通过对月球表面的探测,发现和研究月球资源,为未来的月球资源开发打下基础。
4、月球基地建设:机器人可参与月球基地的建设,协助人类实现长期在月球的居住和科研。
技术难点及解决方案
1、技术难点:

(1)复杂环境下的移动控制:月球表面环境复杂,机器人需要具备较强的适应性和稳定性。
(2)远程操控的实时性:远程操控系统需要保证信号的稳定和实时性,以确保机器人的操作精确。
(3)科研设备的集成与协调:机器人需要携带多种科研设备,如何实现设备的集成和协调是技术难点之一。
2、解决方案:
(1)加强研发先进的控制系统和算法,提高机器人的适应性和稳定性。

(2)采用高性能的通信设备和技术,保证远程操控的实时性。
(3)优化设备布局和集成方式,实现科研设备的协调运作。
发展前景及对未来的影响
六足登月机器人的研发,将极大地推动我国航天科技的发展,提高我国在月球探索领域的竞争力,这款机器人将为月球科研提供强有力的支持,推动月球科学研究的深入,六足登月机器人的研发还将带动相关产业的发展,促进科技进步和经济发展,随着技术的不断进步,未来六足登月机器人将在更多领域得到应用,为人类探索宇宙开辟新的道路。
六足登月机器人的研发是一项具有重大意义的技术创新,它将为我国航天科技的发展提供有力支持,推动月球探索事业的进步,我们期待着这款机器人在未来的研发和应用中,为人类探索宇宙带来更多的惊喜和突破,让我们共同期待这一技术的未来发展吧!











 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...